Self driving car
مقدمة
يعد تجنب العقبات وظيفة أساسية في مجال الروبوتات، حيث تهدف الروبوتات المستقلة إلى الوصول إلى وجهتها دون الاصطدام بالأشياء. يُعتبر تجنب العوائق في الوقت الفعلي من الأمور الحيوية لضمان حركة الروبوت بسلاسة وأمان في بيئات متنوعة.
فكرة المشروع
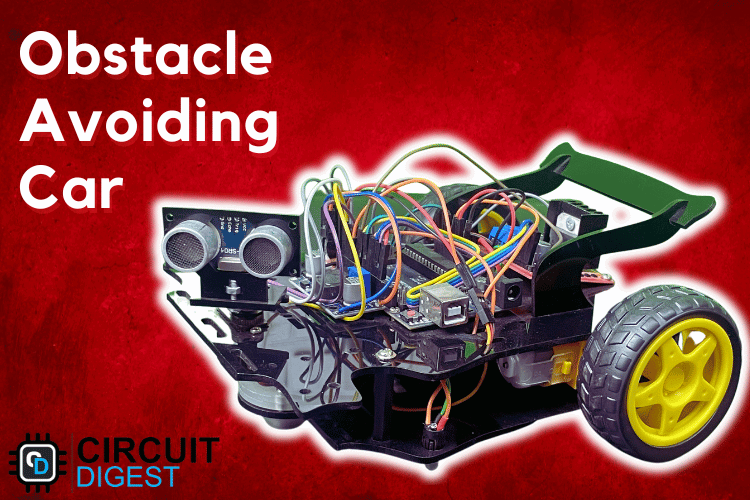
يتمثل المشروع في تطوير روبوت مستقل يعتمد على منصة Arduino لتجنب العقبات في الوقت الفعلي. يستخدم الروبوت مجموعة من أجهزة الاستشعار لاكتشاف العقبات في مساره، ومن ثم يقوم بمعالجة البيانات لتحديد مسارات جديدة للتحرك دون الاصطدام بها.
كيفية عمل النظام
اكتشاف العقبات:
- يتم تجهيز الروبوت بأجهزة استشعار مثل أجهزة الاستشعار فوق الصوتية لاكتشاف العقبات في مساره.
- تقوم أجهزة الاستشعار بإرسال إشارات إلى Arduino لمعالجة البيانات.
معالجة البيانات:
- يقوم Arduino بمعالجة البيانات المستلمة من أجهزة الاستشعار لتحديد موقع العقبات والمسارات البديلة.
- يستخدم الروبوت خوارزميات تجنب العقبات لتحديد أفضل مسار للحركة دون الاصطدام بالعقبات.
الحركة في الوقت الفعلي:
- يتحرك الروبوت بناءً على المسار المحدد بواسطة Arduino، مع تحديث مستمر للبيانات لضمان تجنب العقبات بشكل فعال.
- يتكيف الروبوت مع التغييرات في البيئة من خلال اكتشاف العقبات الجديدة وإعادة تخطيط المسار.
التطبيقات والفوائد
- تحسين الاستقلالية: يمكن استخدام الروبوتات المستقلة في مجموعة متنوعة من التطبيقات مثل المستودعات، والمنازل الذكية، والبيئات الصناعية.
- تعزيز الأمان: يساعد تجنب العقبات في تحسين أمان الروبوت ومنع الاصطدامات التي قد تتسبب في أضرار.
- توفير الوقت والجهد: يمكن للروبوتات المستقلة تحسين الكفاءة وتقليل الحاجة إلى تدخل الإنسان في بيئات العمل المختلفة.
الدعوة للتواصل
إذا كنت مهتمًا بتطوير روبوتات مستقلة قادرة على تجنب العقبات أو تبحث عن فكرة مشروع تخرج مبتكرة، فإن مشروعنا لتجنب العقبات في الوقت الفعلي باستخدام Arduino هو الخيار المثالي لك. تواصل معنا اليوم لنبدأ في تحويل هذه الفكرة إلى واقع يسهم في تطوير الروبوتات المستقلة.
هاتف: 00962795288173
ايميل: info@sparkjo.com
واتس اب: 00962795288173


